GPS Receivers
- portable (roving) receivers (handheld, cars, airplanes)
- permanent “base stations” (surveyed location, tracks error in satellites/transmission)
- temporary survey stations (days/weeks)
How does it work? Triangulation (from up to 12 satellite signals) based on time
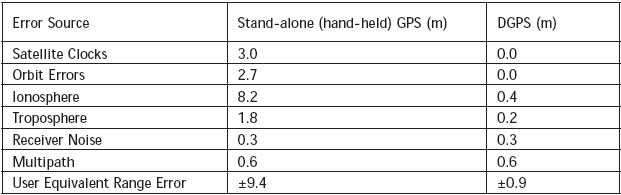
- uncorrected, single receiver GPS
- 3 satellites make a positional triangulation based on distance between satellite and receiver
time-delay = distance (approx. 0.05 seconds to receiver from a satellite directly overhead) - time is established by “psuedo-random” code transmitted from each satellite and compared to receiver-generated code
https://www.e-education.psu.edu - This is called “coarse acquisition” GPS. The C/A code repeats every 1023 bits
 . source
. source - A 4th satellite is required to correct the non-atomic clock time at the receiver.
- PDOP (Position Dilution of Precision) from
- location of satellites (ephemeris error) and satellite clocks (SV is “space vehicle” I think)
- obstruction of satellites, poor geometry (clustered, not spread out).
- time errors due to
- atmospheric changes (“billows” in the ionosphere—what’s the ionosphere? 50-200 km)
status map for ionospheric delay over North America - multipath (bounce) signals
- receiver/atmospheric noise
http://mycoordinates.org/accuracy-performance-of-hand-held-gps/
- atmospheric changes (“billows” in the ionosphere—what’s the ionosphere? 50-200 km)
- differential GPS
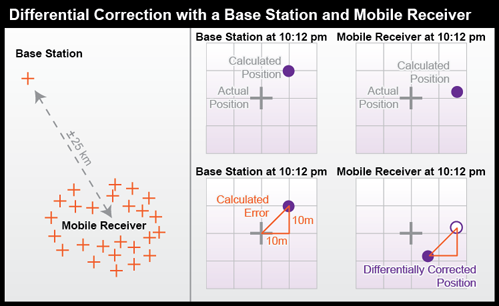
image sources: http://ffden-2.phys.uaf.edu and https://www.e-education.psu.edu
corrects by comparison to base station- satellite time and position uncertainty (drift in clocks, ephemeris errors, etc)
- atmospheric/ionospheric conditions
- real-time differential GPS (DGPS) using radio signals from Air Traffic Control system, coast guard, local base station, etc
- Different kinds of DGPS
- real-time vs post-processing
- code vs carrier phase
- satellite, radio, local, or RTK source for correction
- real-time DGPS
- signal from base station (via radio)
- signal from satellite (airplanes, mapping receivers)

US Coast Guard http://www.navcen.uscg.gov/?pageName=CurrentCoverage
- post-processing DGPS
- base stations—data is downloaded “reference station” and compared with rover positions
- national base station http://www.ngs.noaa.gov/CORS/ system of public receivers
(Trimble, Topcon and other companies have private networks) - local temporary base stations— placed locally to establish “relative” precision”
Dave and Jeff’s work in the Eastern Cordillera of Argentina



place a receiver that doesn’t move all day (unless someone steals it!), it has to be higher than the rover, and see the same set of satellites. Result is <2-3 cm horizontal precision, day to day, but unknown accuracy.
- national base station http://www.ngs.noaa.gov/CORS/ system of public receivers
- For differential correction, the degree of precision in the correction depends on the distance from the base station (same ionospheric distortion and lower atmospheric noise)
- base stations—data is downloaded “reference station” and compared with rover positions
- Code phase vs Carrier phase corrections
- code – phase
- The C/A code repeats every 1023 bits (see above)
- approx 1 MHz (one millisecond)
- carrier – phase
- need 15 to 30 minutes of continuous signal from satellites and receiver
- 1575.42 MHz (1.5 GHz) or potentially 1000 time more precision defining the start of the “code”
- how does “carrier” frequency transmit information?
- changes in nature of signal make ones and zeros for pseudorandom code (or in fact, a tenor singing an “A”)
- AM/FM/phase modulation

modified from http://www.kowoma.de/gps/Signale.htm

www.princeton.edu/~alaink/Orf467F07/GNSS.pdf
- “sub-meter” data: 1 m down to 1 cm !
- real-time kinetic GPS (RTK)
is carrier phase differential GPS in real time with radio links to base stations ( < cm precision as rover is moving)
- code – phase
- 3 satellites make a positional triangulation based on distance between satellite and receiver